














































自动化捡货解决方案在工业中的应用,使用3D机器人
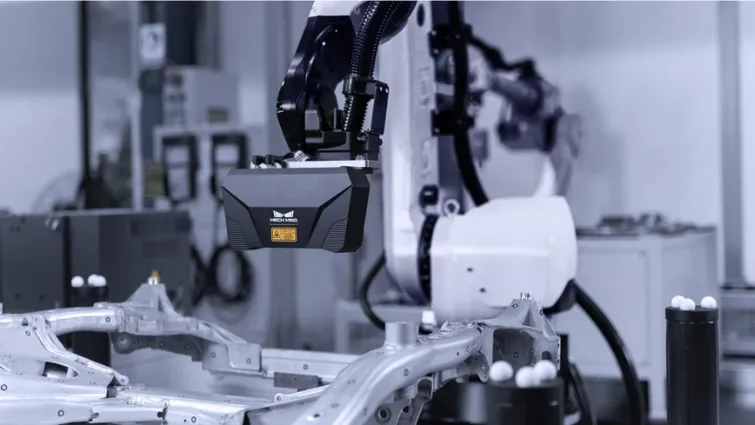
自动化捡货解决方案利用3D机器人,提高生产效率,允许机器人从混合容器中识别并提取物体。通过3D视觉系统,机器人能够处理反射面或深色物体,从而提供卓越的准确性和稳定性。

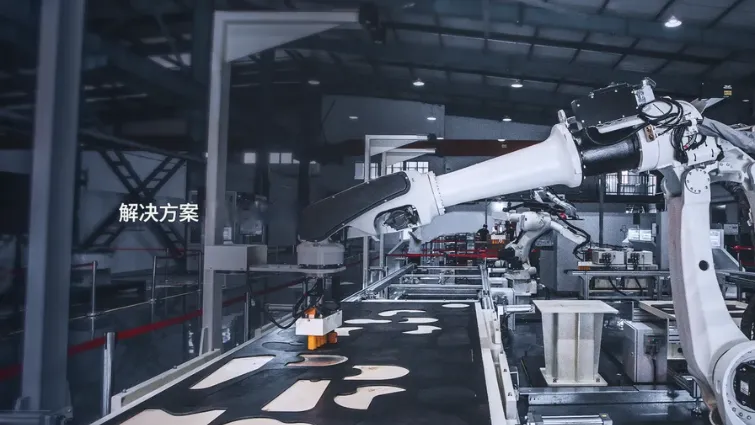
捡货解决方案
在3D视觉系统的引导下,机器人能够识别随机堆放的物料,即使是那些具有深色或反射表面以及复杂结构的物料,也能够准确地从深处的容器中捡取,且不会损坏组件。
核心优势

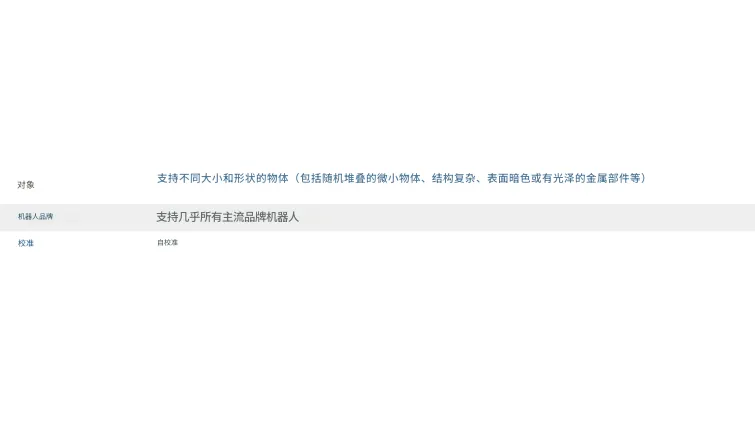
规格
智能算法
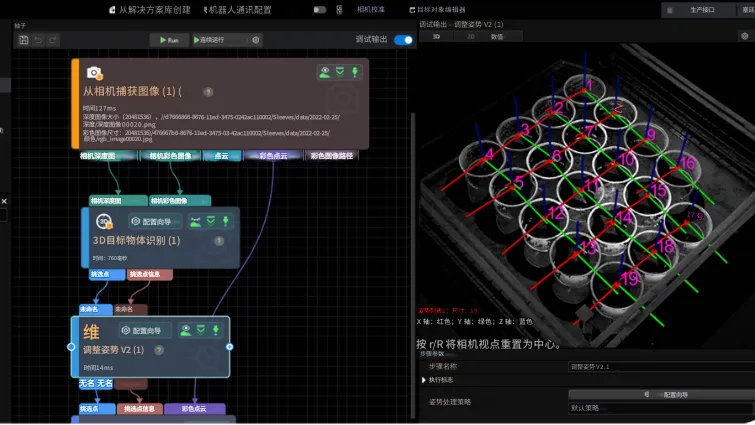
- 机器视觉软件简化所有代码为步骤,用户可以无需编写任何代码便能编辑算法。
- 它可以支持用户开发定制的算法并独立部署多个典型应用,包括捡货、机器操作、单件捡取、拆托盘和堆托盘等。
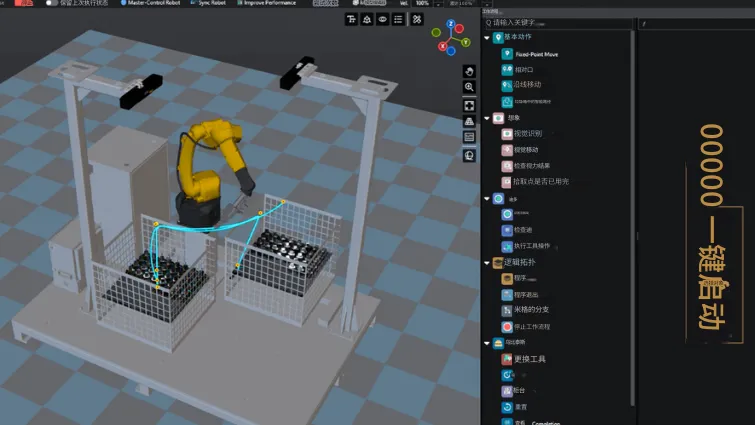
- 软件左侧为一键仿真。用户可以直观地看到机器人的运动路径。
- 右侧是机器人的操作过程,易于学习操作。
- 与传统的基于代码的编程软件不同,这款软件是图形化的机器人编程软件。
- 内置路径规划、碰撞检测、抓取策略及其他智能AI算法,确保机器人抓取准确且无碰撞。
- 使用该软件,非专业人员经过简单培训后也能部署各种机器人应用。
- 该软件支持几乎所有主流品牌的机器人。